Ever since I saw those cool robotic spiders online, I wanted to make one myself — something that actually walks, not just wiggles. Using a bunch of servos, an Arduino, and way too many hours of trial and error, I finally made my own quadruped robot that moves like a spider (well, almost).
The idea was to build a small four-legged robot capable of walking, turning, and performing gestures — all controlled by custom code. Unlike typical car like robots, this one mimics animal movement, which means each leg’s motion has to be perfectly timed. It’s a blend of mechanics, coding, and patience.
The body is made of lightweight PVC sheets, and each leg has two servos — one for the hip and one for the knee. I used an Arduino Nano to control the 8 SG90 servos using custom algorithms. The hardest part? Calibrating the legs so it doesn’t moonwalk backward instead of forward.
The robot uses a simple sequence — each leg lifts, swings, and lands in coordination with the others. Timing is everything. I experimented with different patterns to find one that made it walk smoothly instead of doing the robot dance. Every servo angle matters here. When it finally took its first proper steps, it was wild — seeing code turn into coordinated motion never gets old. The robot can walk, turn, and even do a little handshake move I programmed just for fun.
This project taught me a lot about balance, timing, and how complex natural movement really is. If you’re into robotics or just want to build something that moves like a creature, a quadruped is a perfect challenge.
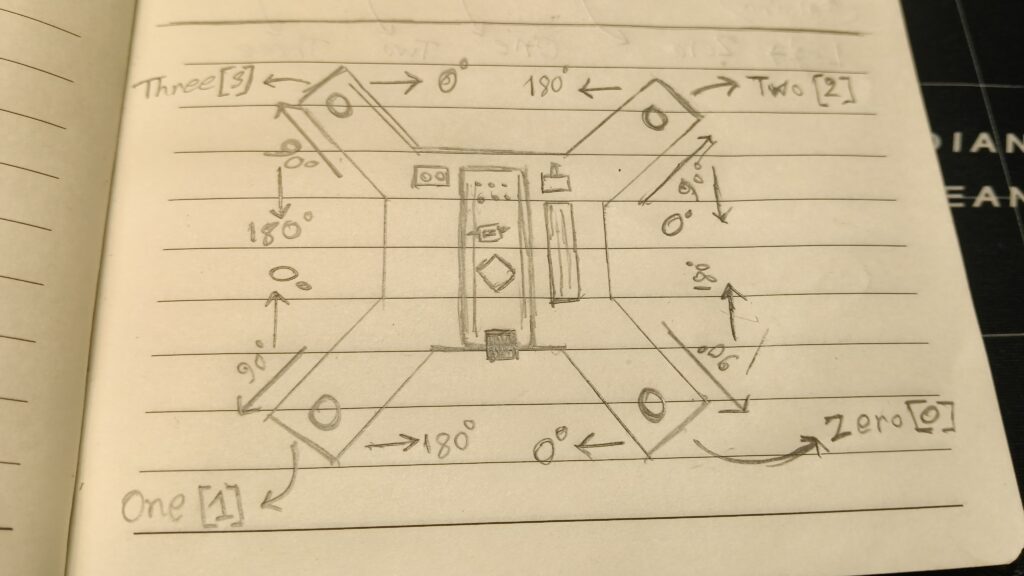
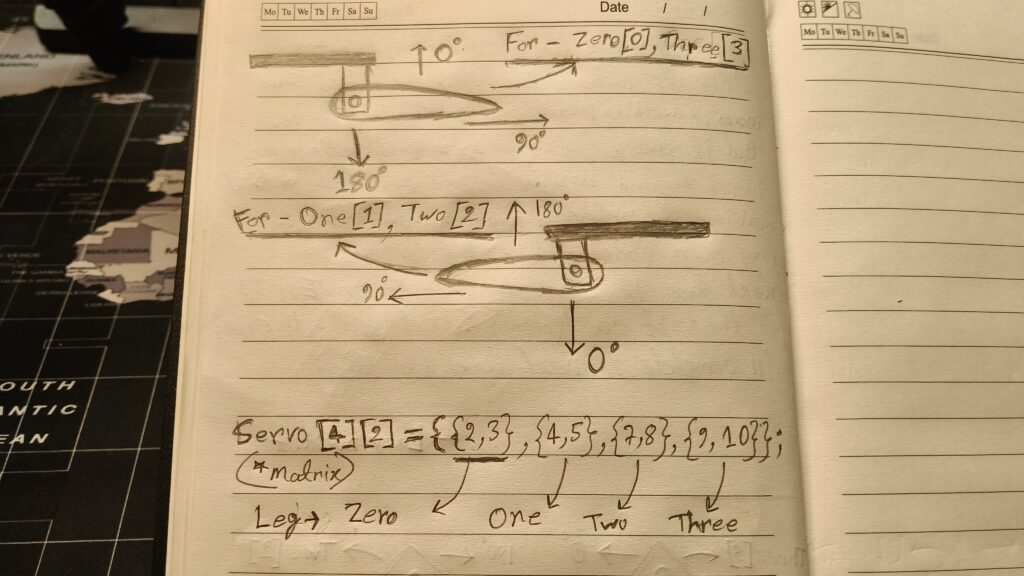
If you want to build it yourself check out these two diagrams. And I’ve uploaded the code on my Github.
This project taught me a lot about balance, timing, and how complex natural movement really is. If you’re into robotics or just want to build something that moves like a creature, a quadruped is a perfect challenge.